1985年、中国は二足のロボットを立たせることに成功した。これは、ただ立たせるだけだったが、2年後の1987年12月31日、よろよろではあったが歩行に成功した。これは足だけのロボットではあったが、大きな一歩であった。
日本のようにCADなどが使用できる、恵まれた環境ではない。研究者達は鉛筆と定規を駆使して、二足歩行を成し遂げたという。日本のような事業化を目標とした企業でなく、大学という限られた環境での開発であることは評価に値する。
そして1989年、国防科技大学の研究員達は次なるステップにチャレンジした。それは、胴体、首、頭、両手のついたヒューマノイドロボットである。
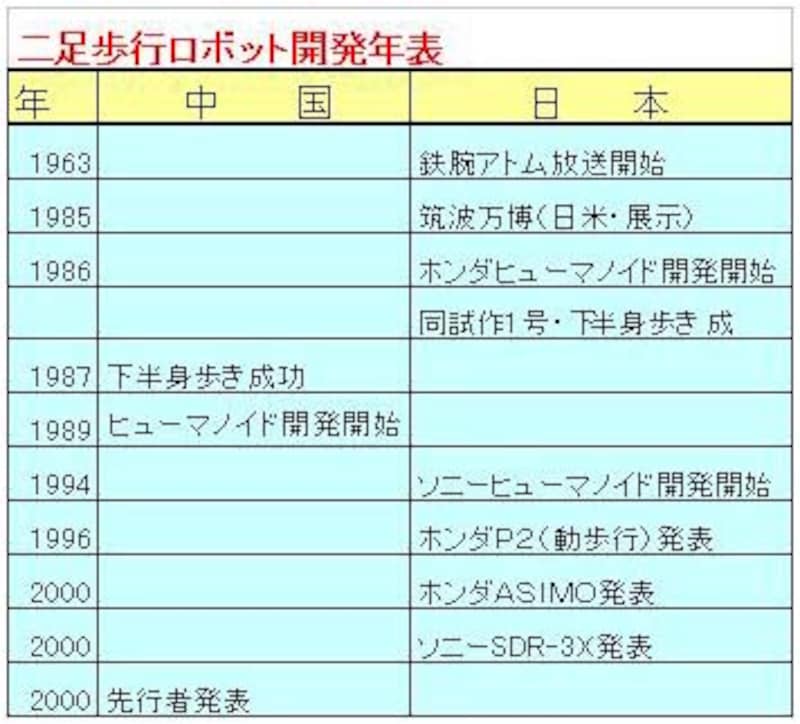
≪二足歩行ロボット開発の流れ(日中間比較)≫
日本企業の開発スピードの速さが如実に現われている。ここで「鉄腕アトム」はアニメであるが、発想の原点として表記した。
開発開始から10年、完成した二足歩行ロボットは「先行者」と命名された。10年前は一歩歩くのに6秒かかっていたが、毎秒二歩まで進歩した。さらに当時は平地でしか歩けなかったものが、坂やちょっとした凸凹も歩けるようにまで性能アップした。そして簡単な内容であるが発話機能も加わっている。
2000年11月29日、長沙国防科技大学で初公開された「先行者」は同日、新華社電で配信され、話題の渦を引き起こす形となったのだ。1ページ目の写真がその当時配信された写真である。次ページでは、その基本性能やロボット開発の課題などについてまとめてみた。






