前を走るクルマを捕捉し車間距離を推定
さて、ARスカウターモードとはどんなモノかを知るには、実際に動画を見てもらうのが手っ取り早いと思う。一般道をルート誘導中、画面の左半分(以上)に映し出されるのは、車内に設置したカメラで撮影したフロントガラス越しの映像。この映像に、ルートや進行方向を示す矢印、レーン案内などの情報が、実写映像の上に重ねて表示される。走行中、自車の前方にクルマがいると、カメラは、そのクルマをロックオン。これが「ターゲットスコープ」という機能。前方のクルマを捕らえると車間距離を測定し、実車映像の右側のバー表示で、前車との距離や適正車間距離の目安を教えてくれる。この適正車間距離は、渋滞学で有名な東大の西成教授の意見を元にしたもので、新サイバーナビの適正車間距離を保っていれば、渋滞を引き起こしにくい運転ができるのだそうだ。なお、ターゲットスコープの、前車を捕らえたときの効果音は、デフォルトではオフになっている。

前車を捕捉し車間距離を推定する
クルマが信号で停車すると、今度はカメラが信号を捕捉する。そして信号が赤から青へと変わるのを検知。アイコンでドライバーに通知してくれる。また停車時に自車の前にクルマがいる場合は、同時に前方のクルマとの距離も計測していて、前方のクルマが動いて自車との距離が離れると、前のクルマが動いたことを効果音で知らせる機能も。よそ見をしていて信号が変わったのに気づかず、後続のクルマにクラクションを鳴らされる心配は、新サイバーナビならないのだ。

交差点を認識
車線を認識し、クルマのふらつきを教えてくれる!
高速道路走行中は、前方のクルマをターゲットスコープで捕捉し、車間距離を教えてくれるだけではなく、車線(白線)の認識も行う。そして、車線をまたいでしまったような場合は、実車映像上の白線の色が紫色に変化。ふらつき走行などを画面で教え、ドライバーに注意を促す。白線をまたいだとき、注意を促す効果音があるとよりいいとは思うが、意図的な車線変更の時と、ふらつきによって車線をまたいだ時の区別が難しいのだろう。今のところは、操作等で画面を見ていて車線をまたいでしまったときの注意喚起にとどまる感じだ。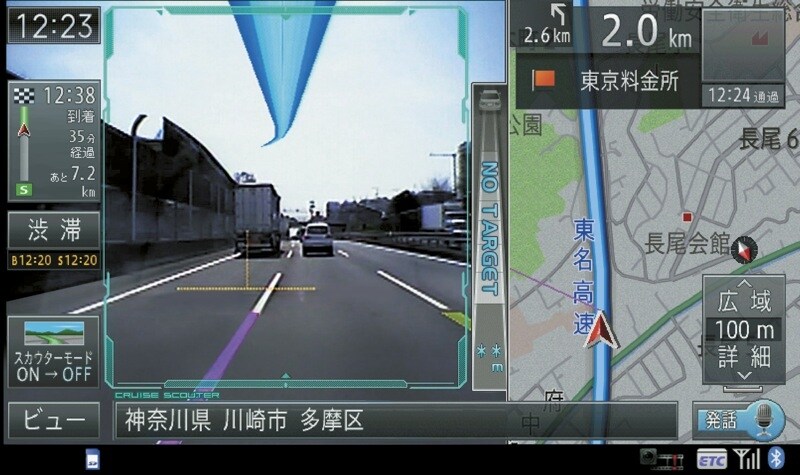
白線を認識してまたぐと色が変わりお知らせ
ほかにも、実写映像の上に、コンビニやガソリンスタンドのアイコンや建物を立体的に表示する機能も。もっとも、これは従来からあるドライバーズビューのアイコンや立体施設を、そのまま流用しているもののようだ。現時点で、ARスカウターモードが実現しているのは、以上のことだが、信号待ちで前車が動き出したのを教えてくれる機能は有効。また、交差点案内等は、実際の映像を元にしているので、ドライバーズビューにくらべて断然わかりやすい。映像の上に重ねて表示する施設アイコンのわかりやすさなど、まだまだ改善の余地がありそうな点は多々あるものの、カーナビが新たな次元に突入したことを感じさせる機能である。